全国招商热线
13056909253 13968395798(周先生)
全国招商热线
13056909253 13968395798(周先生)

地址:浙江省余姚市马渚镇斗门街路江158号
编码:315400
电话:13056909253(周先生)
13968395798(周先生)
传真:0574-62487713
网址:www.jinteautomation.com
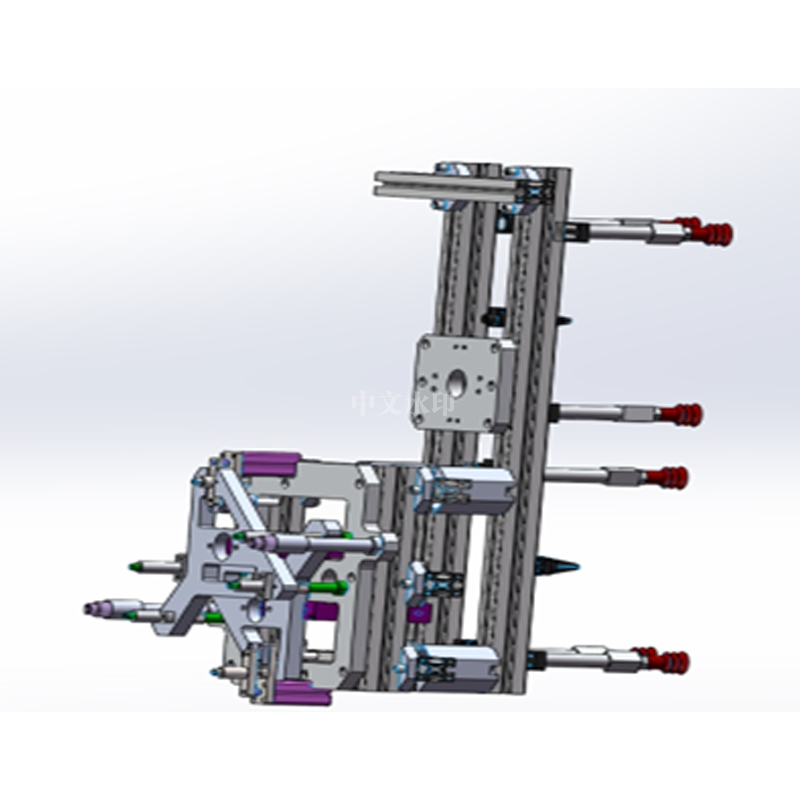
1、手臂应承载力大、刚性好、自身重量轻
手臂的刚性立即危害到手臂爬取产品工件时姿势的稳定性、运动的效率和精准定位精度。如动力自动化装配线刚性差则会造成手臂在竖直水平内的变形形变和平面里侧向扭曲形变,手臂就需要造成震动,或姿势时产品工件卡住没法工作中。因此,手臂般都选用刚性不错的导向性杆来增加手臂的弯曲刚度,各支撑、联接件的刚性也需要有定的规定,以确保能承担所必须的推动力。
2、手臂的运动速率要适度,惯性力要小
注塑机自动化改造由静止不动情况做到常规的运动速率为运行,注塑自动化流水线由常速减到终止没动为制动系统,速率的变动全过程为速率特点曲线图。手臂自身重量轻,其开启和暂停的稳定性就行。
3、手臂姿势要灵便
手臂的构造要紧密精巧,才可以做手臂运动欢快、灵便。在运动臂上改装滚柱轴承或选用钢珠滑轨也可以使手臂运动欢快、稳定。在设计方案手臂时要尽可能使手臂重心点根据旋转中心,或离回转中心要尽可能贴近,以降低偏扭矩。针对手臂与此同时实际操作的机械手,则应使双臂的布局尽可能对称性于中心,以实现均衡。
4、部位精度高
机械手要得到较高的部位精度,除选用先jin的控制措施外,结构类型还留意下述一些问题:
(1)机械手的弯曲刚度、侧重扭矩、惯性力矩及缓存实际效果都可以直接危害手臂的部位精度。
(2)增设定位设备和行程安排检测中心。
(3)有效挑选机械手的座标方式。
5、实用性强,能满足多种多样工作;工艺性能好,有利于检修调节